Blog
Building Jetson Nano Images with Docker and GitHub Actions
Automate building re-usable base images for your hobby robots
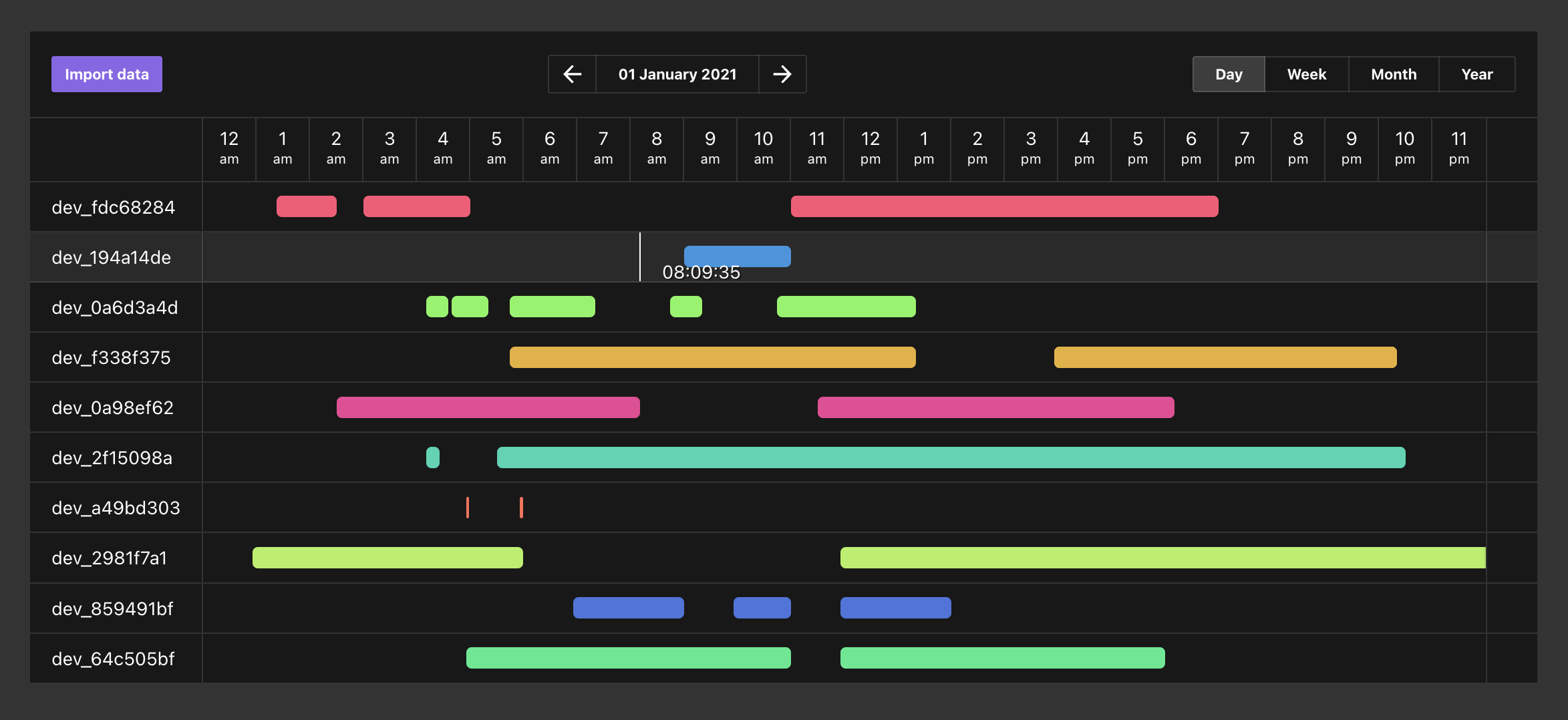
Importing Your ROS 2 Data Into Foxglove
How to convert your ROS 2 files into MCAP files

Installing ROS 1 Noetic on Ubuntu
Downloading Debian packages to set up ROS on your Linux machine
Installing ROS 2 Galactic on Ubuntu
Downloading Debian packages to set up ROS 2 on your Linux machine
Recording Robocar Data with MCAP
Using the MCAP C++ writer to record robotics data
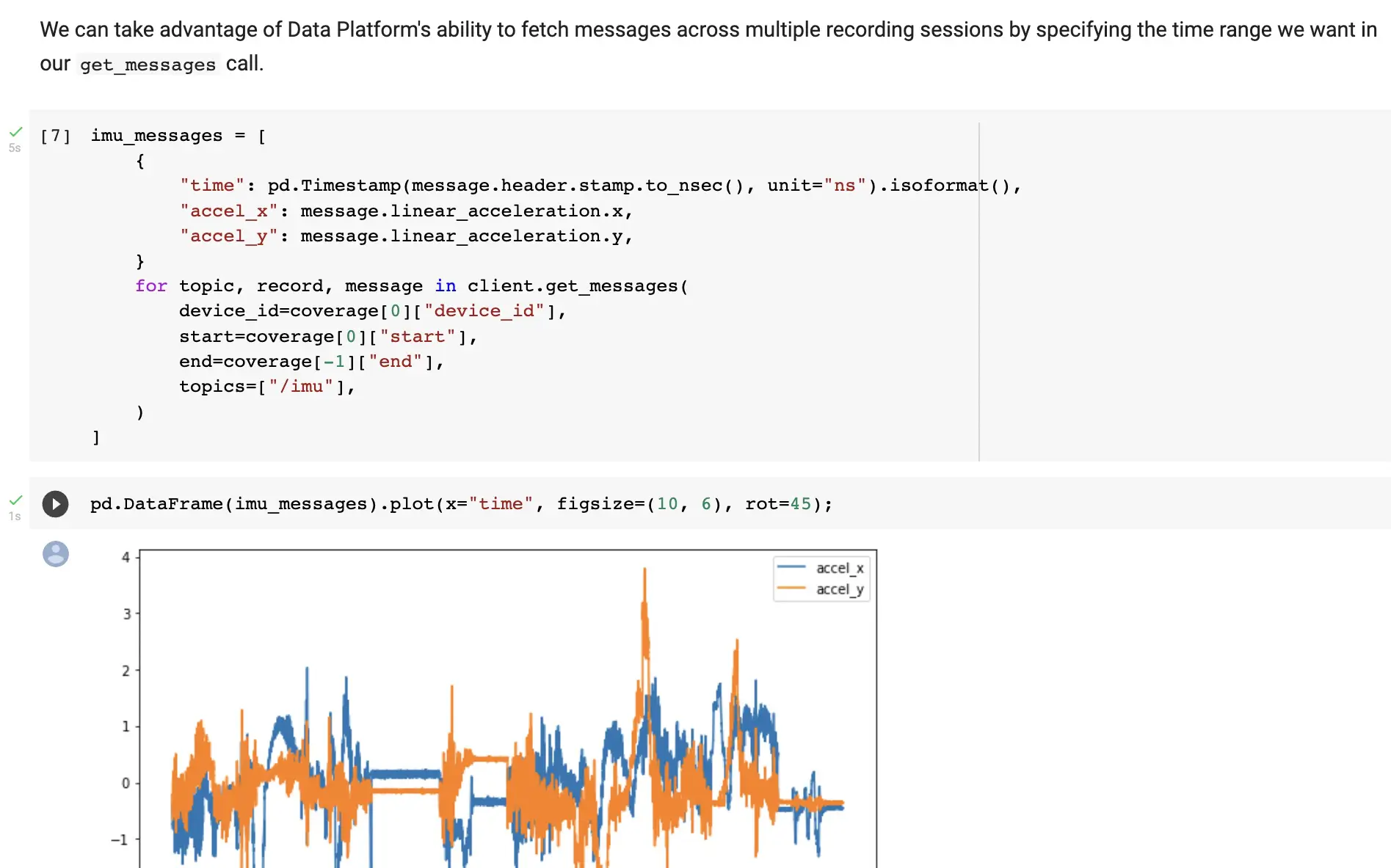
Analyze Your Robotics Data with Jupyter Notebooks
Connect Foxglove to your Jupyter Notebooks
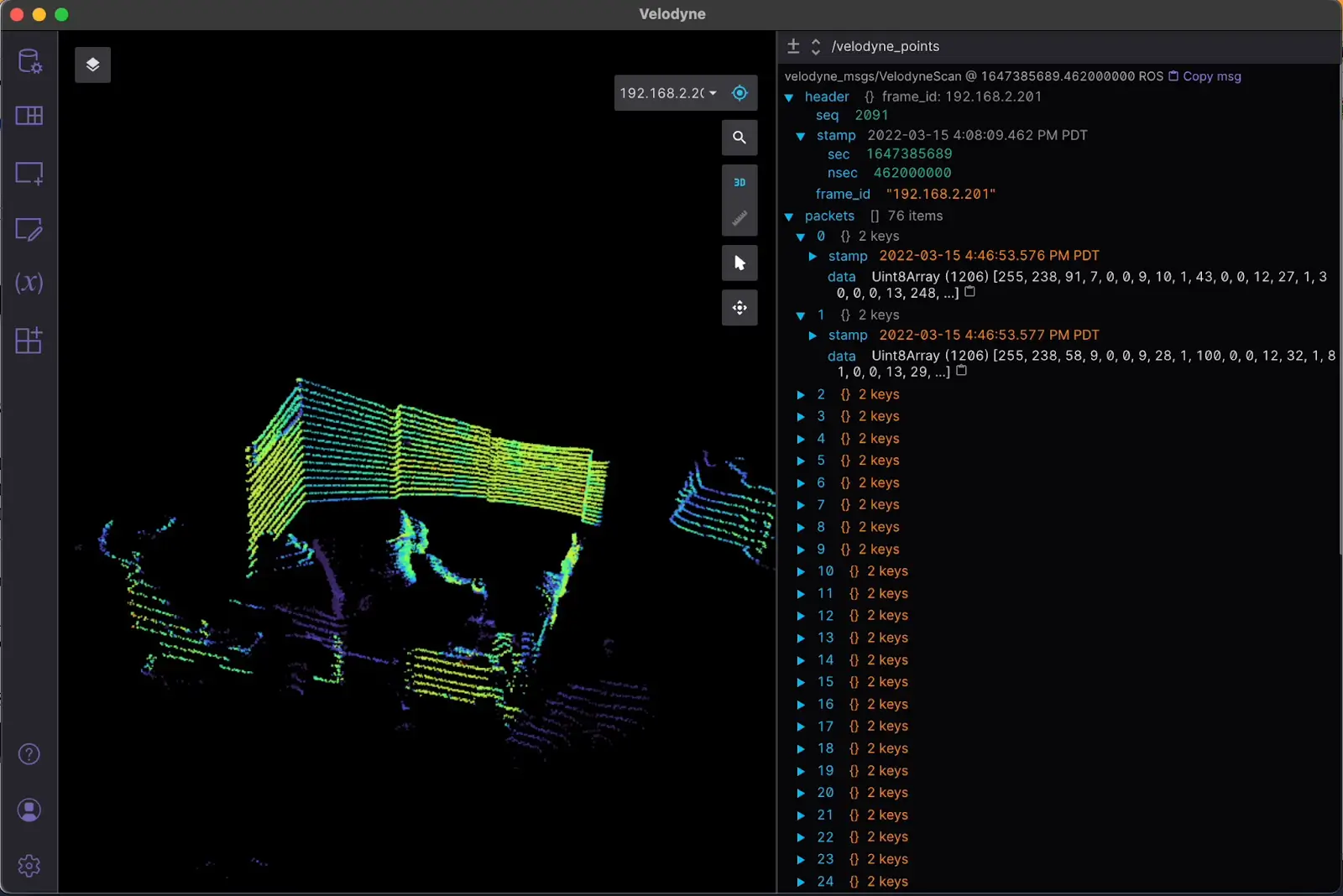
Opening a Velodyne LIDAR Connection
Calibrate your LIDAR sensors with Foxglove

Review: Getting Started with the Yahboom Transbot
Use Foxglove with the robot kit to start understanding your first robot
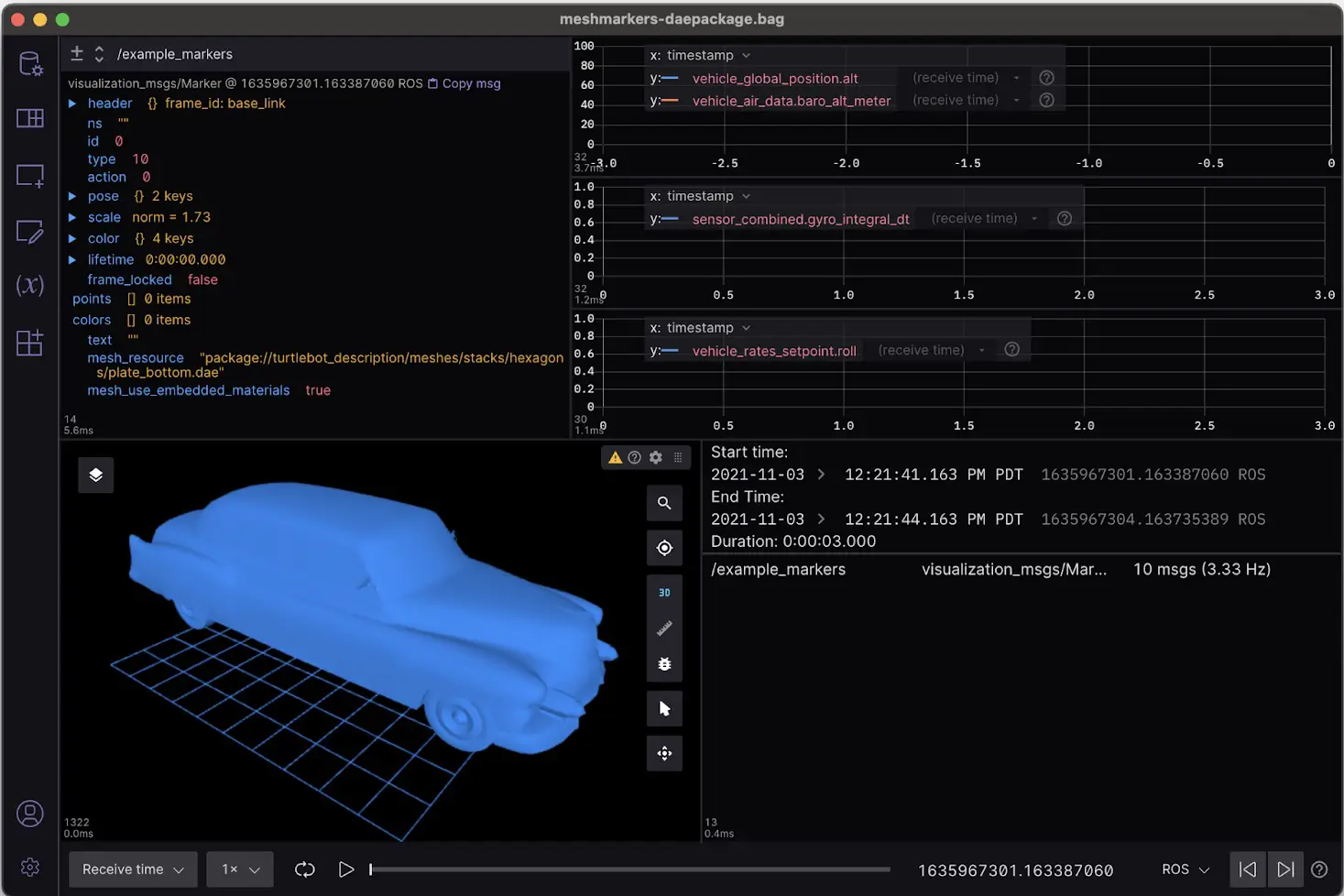
How to Visualize ROS Mesh Markers
Loading mesh resources inside Foxglove's 3D panel
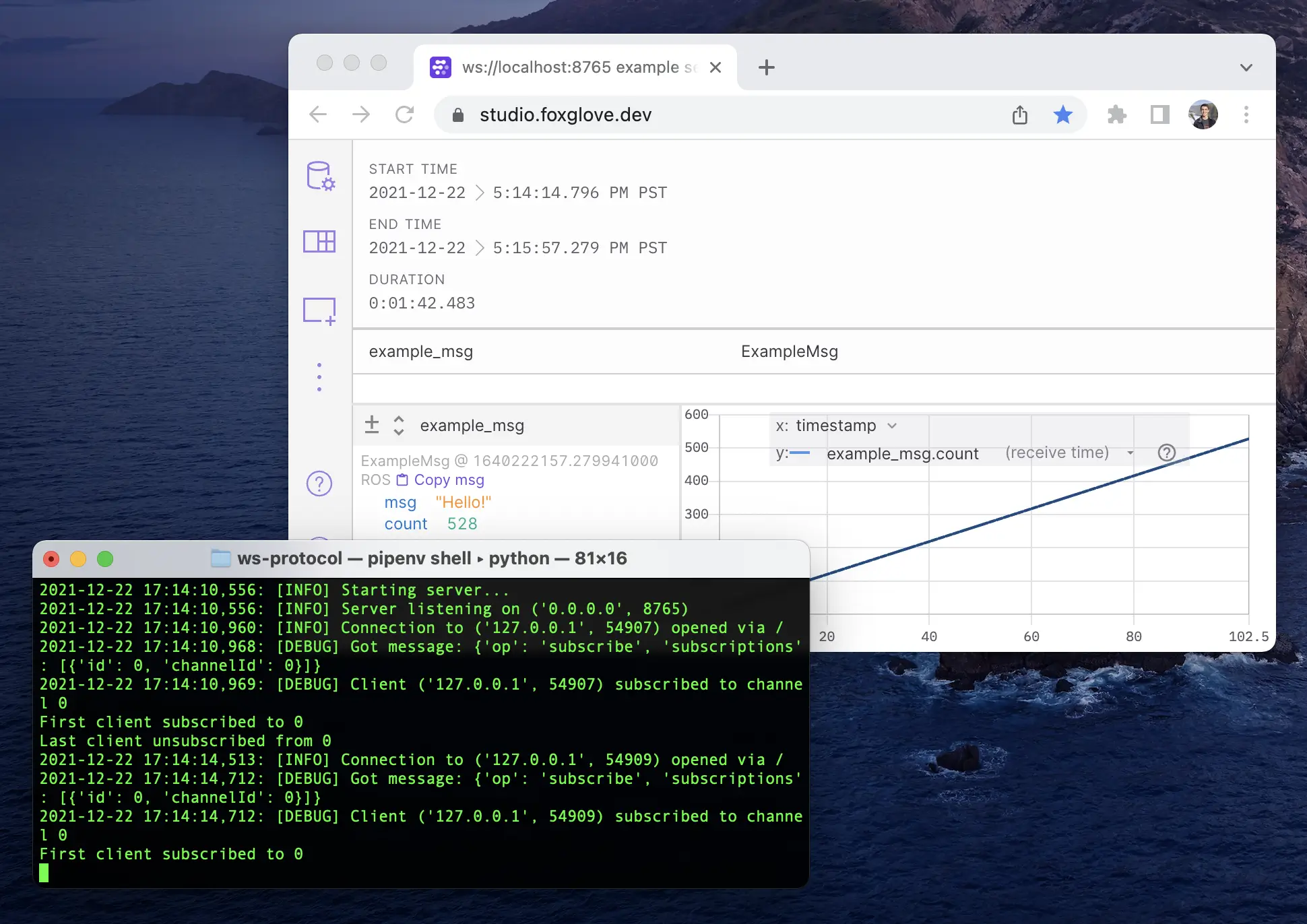
Using Protobuf Data with the Foxglove WebSocket Connection
Write a simple WebSocket server that loads Protobuf data into Foxglove

Annotate Your Robot's Camera Images with Image Markers
Translate image detection outputs into human-readable visualizations
Running Your First ROS Node on Ubuntu, macOS, or Windows
Use turtlesim and Foxglove to learn how to explore robotics data

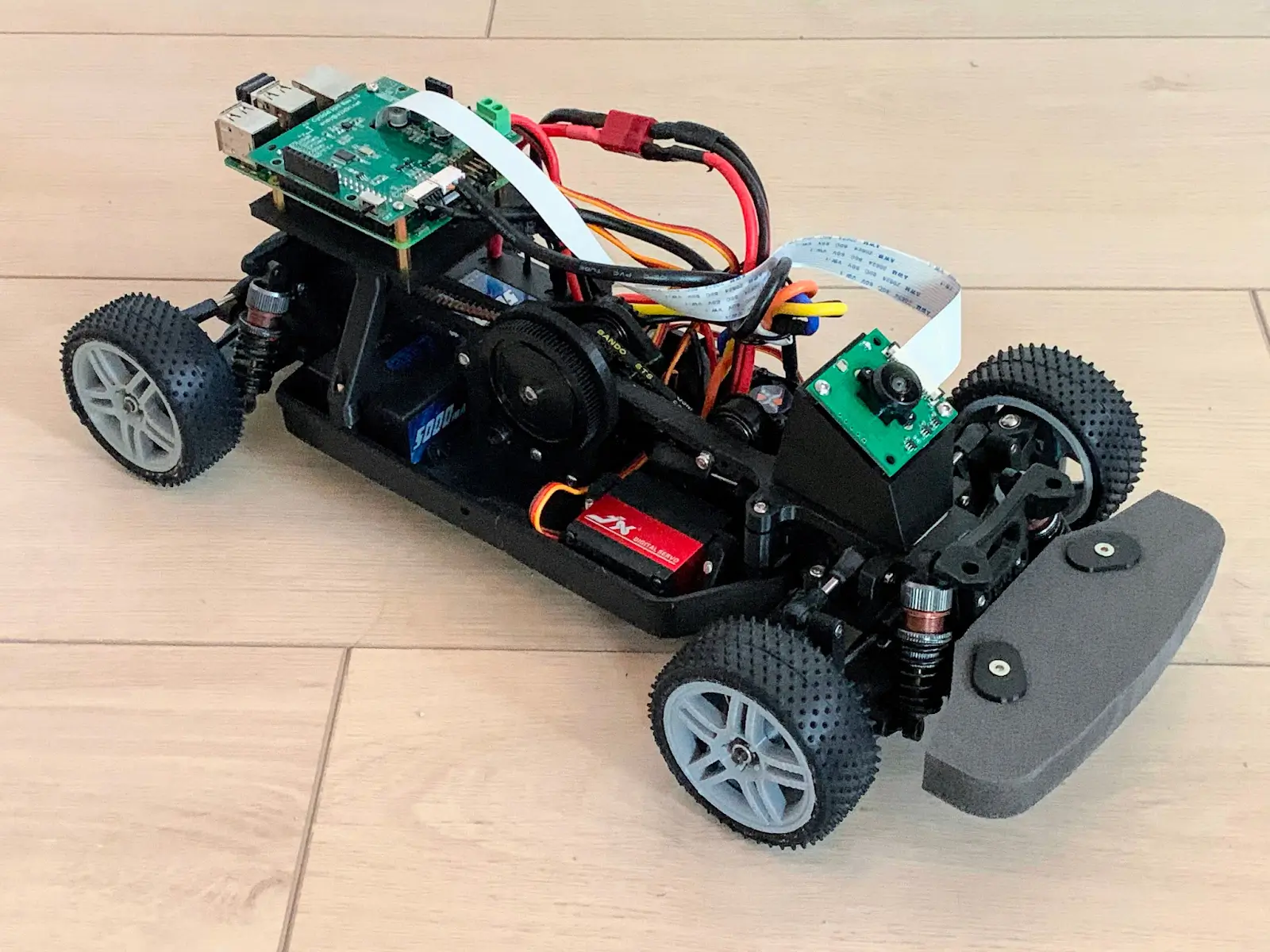
Building and Visualizing Your First Robot
Get started in robotics with the Duckiebot and Foxglove