Blog
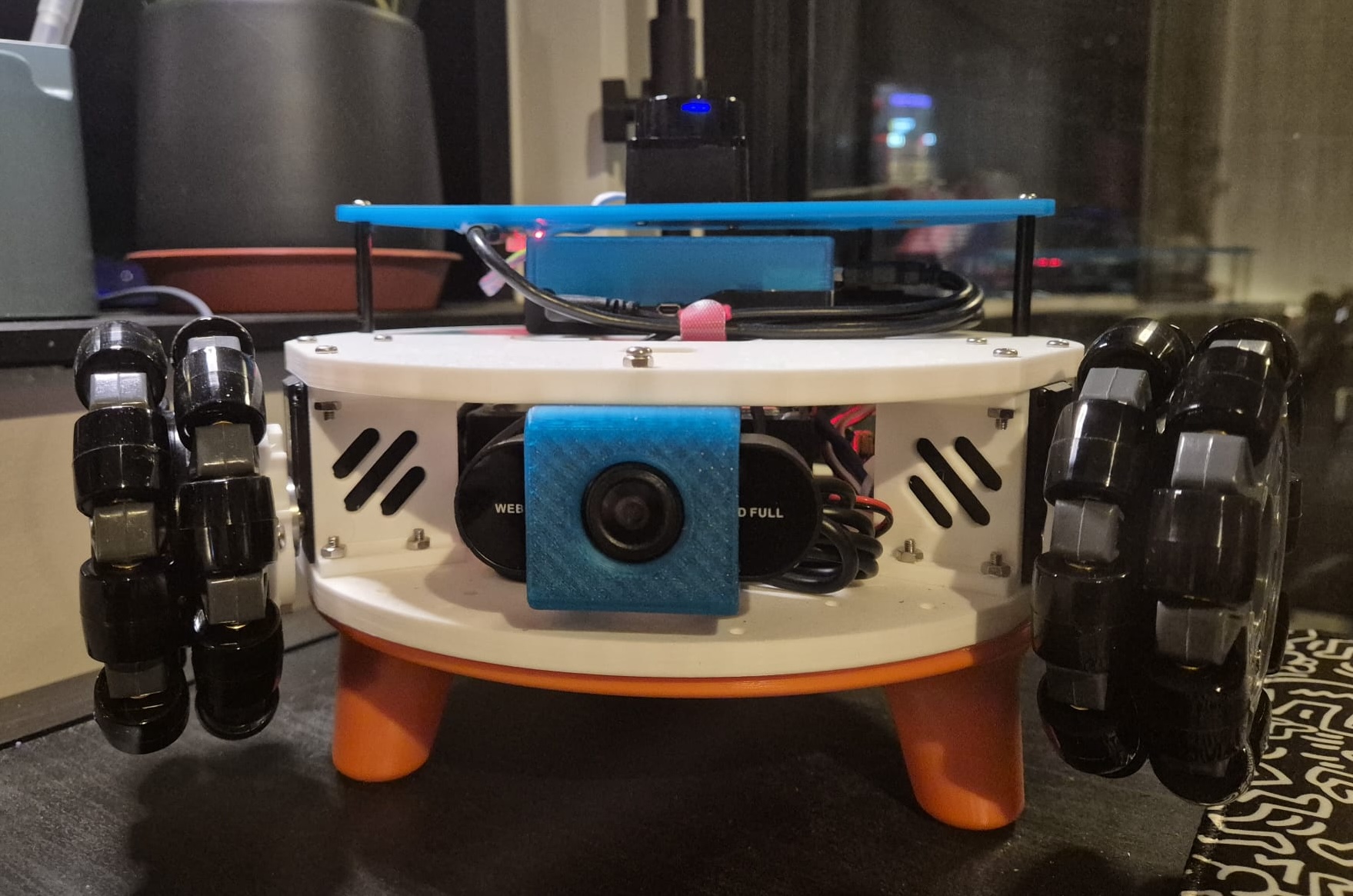
Visualizing Depth Maps and Pointclouds from the OAK-D S2 in Foxglove
How I integrated a Luxonis OAK-D S2 stereo depth camera into my LeKiwi robot's ROS 2 stack — configuring the depthai-ros driver for low bandwidth, compressing pointclouds with Cloudini, and visualizing RGB images, depth maps, and pointclouds in Foxglove's 3D panel.

Autonomous Navigation with LeKiwi and Nav2
How I added autonomous navigation to my LeKiwi robot with Nav2 — covering LiDAR filtering, mapping with slam_toolbox, localization with AMCL, and configuring Nav2 for a holonomic base, all visualized and controlled from Foxglove.

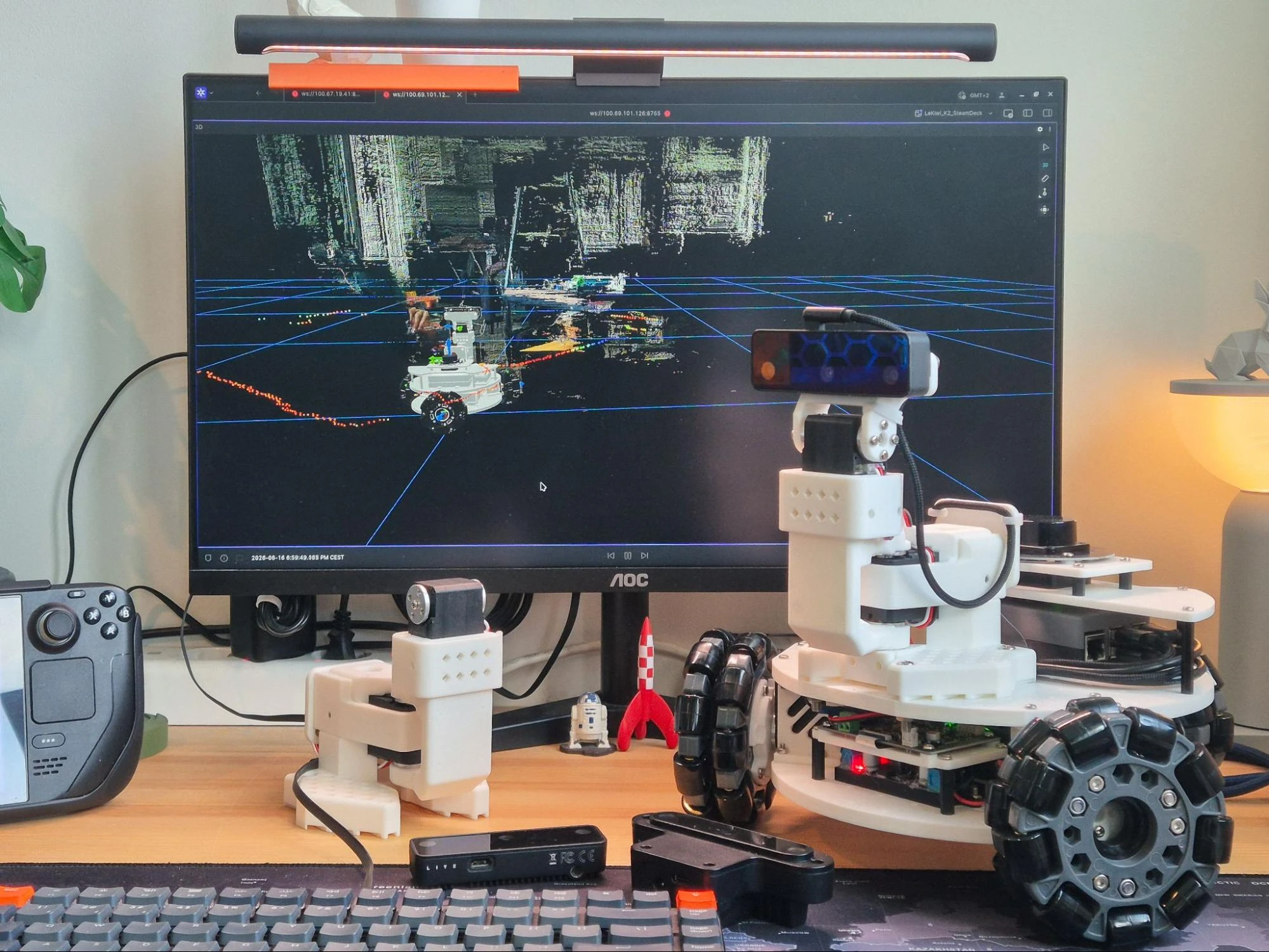
Teleoperating the LeKiwi Robot from a Steam Deck
Learn how to turn a Steam Deck into a portable all-in-one LeKiwi controller and Foxglove monitoring station using Pixi, Distrobox, and ROS 2.

Extension: Bringing photorealistic 3D maps to Foxglove for outdoor robot navigation
Jion Kubo shares a Foxglove extension that renders photorealistic 3D tiles, fuses ROS 2 robot data in a local ENU frame, and publishes goals and clicked points without leaving the 3D view.

GrandTour: Taking Legged Robotics Into the Wild
Introducing GrandTour: a large-scale, open-access legged-robotics dataset spanning 49 missions across diverse conditions to accelerate the development and benchmarking of autonomy algorithms.
Calibrating a monocular camera for the LeKiwi robot using ROS 2
This article details the process of calibrating a USB webcam for the LeKiwi robot, modifying the standard ROS 2 camera calibration process to run headless without a display, using terminal logging and automatic result saving.
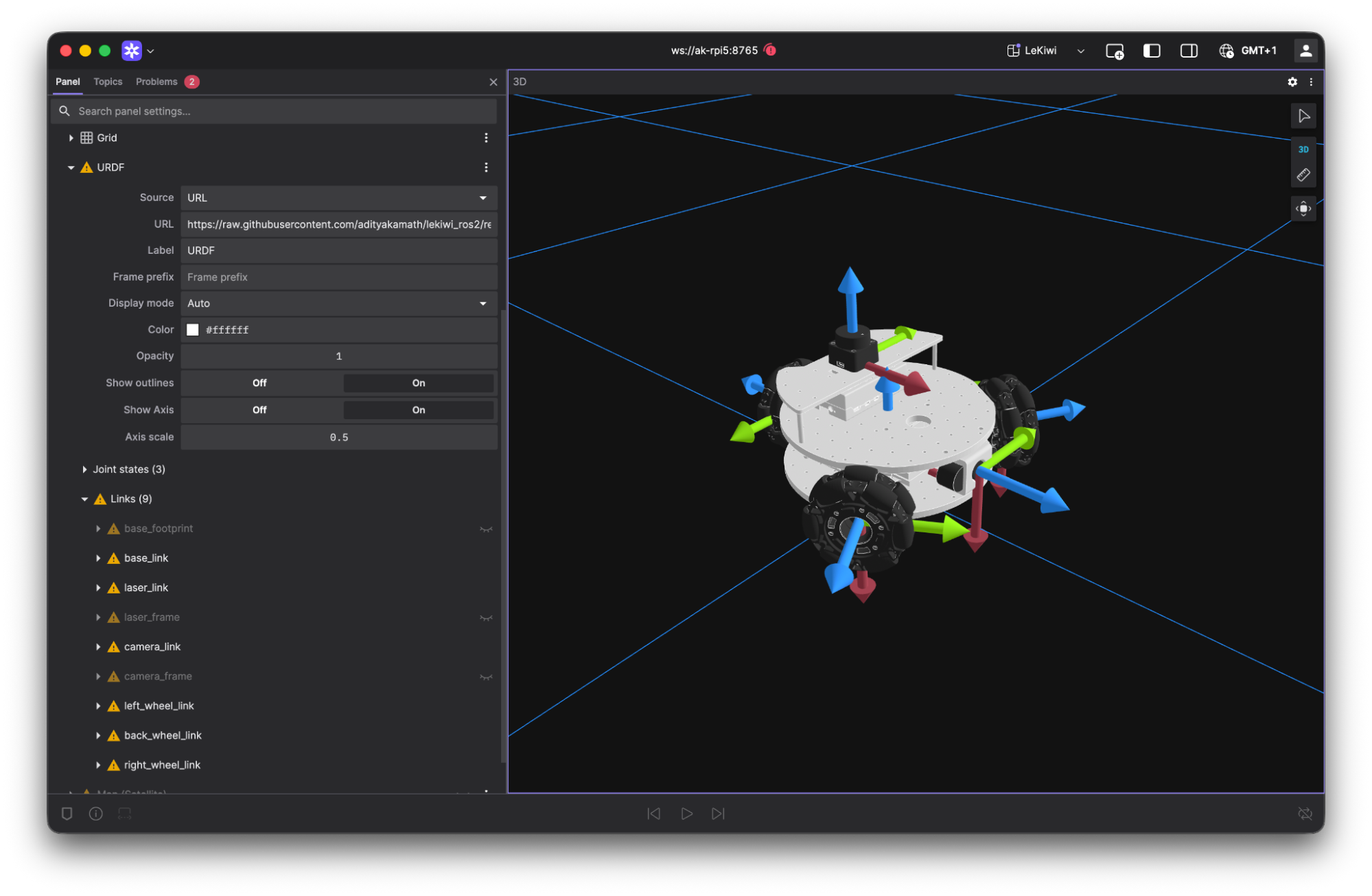
Upgrading the LeKiwi into a LiDAR-equipped explorer
Upgrading LeKiwi robot with a 2D LiDAR and ROS 2, transforming it into a low-cost open-source autonomous platform
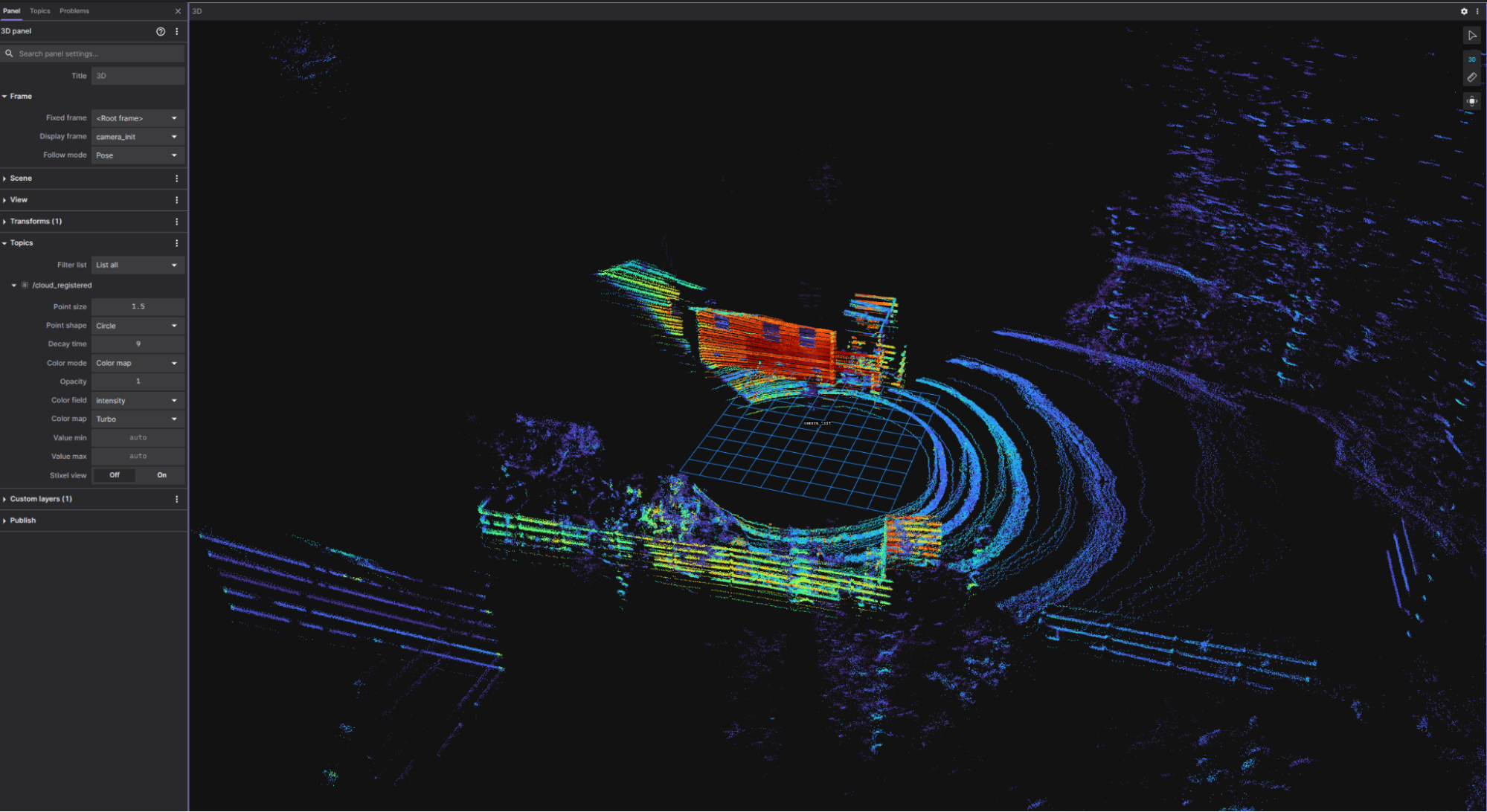
Turning a VLP‑16 Into a “Spherical” Scanner
How a secondhand VLP‑16, one extra mechanical axis, and encoder-based deskewing turned into a cave-mapping learning project