Foxglove Agent & Connecting to Data
Connect to all your robotics data from one integrated platform.
A better way to connect to your robotic data.
Visualize, debug, and manage all your multimodal data in one purpose-built robotics and physical AI development platform.
01
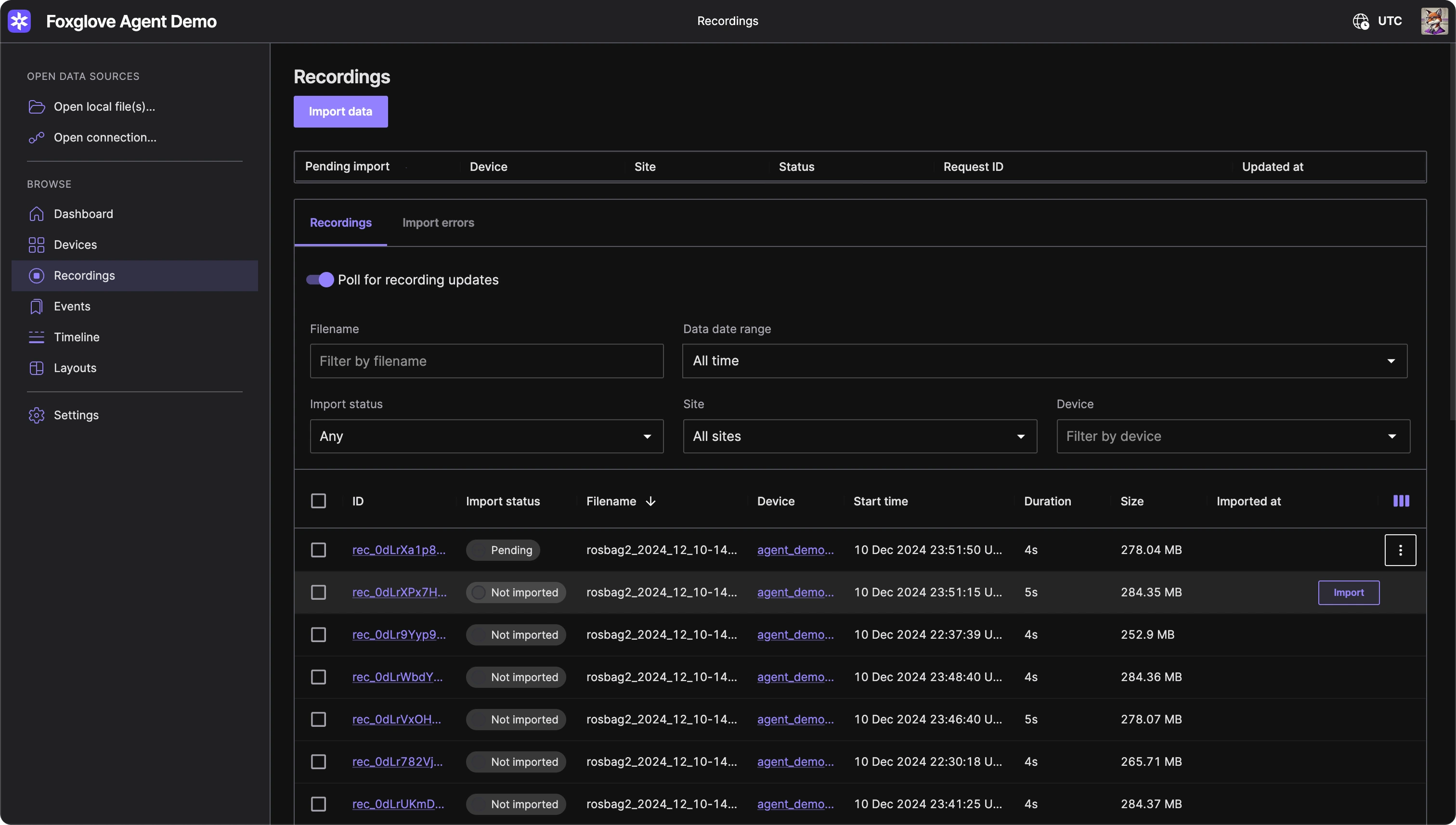
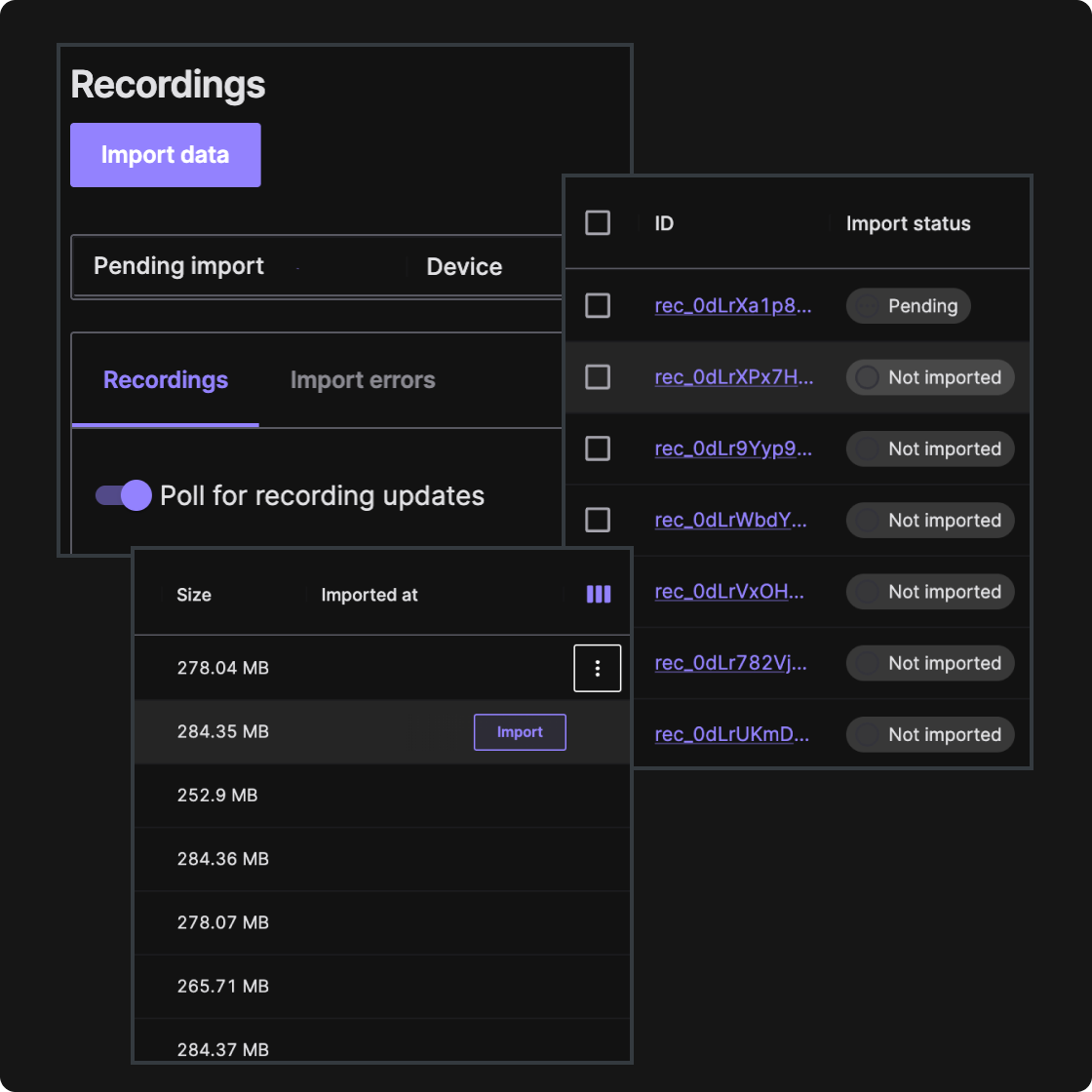
Data ingestion, simplified.
The Foxglove Agent simplifies managing storage on your robot's local disk and automates data import. When new recordings are available, the Agent imports them automatically or on-demand, eliminating the hassle of manually transferring and managing data for analysis. Additionally, you can upload recordings directly from the Foxglove UI or via the API.
02
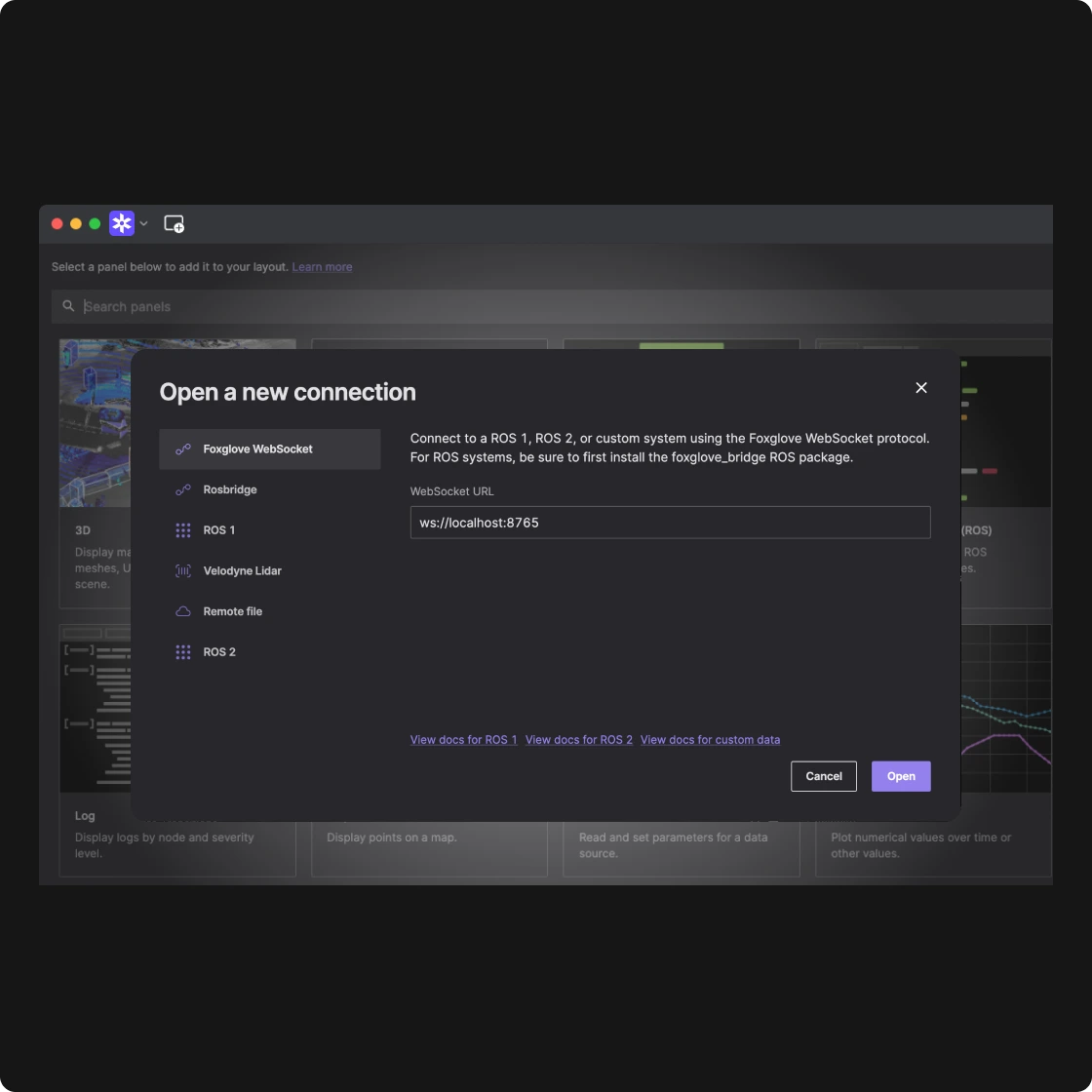
Connect to your live robots without the complications.
Connect to your live robot using the Foxglove WebSocket protocol for seamless, real-time data visualization. Build custom websocket servers using templates from the foxglove/ws-protocol repository, and connect live data or remote files by entering the URL. Designed for simplicity and firewall compatibility.
03
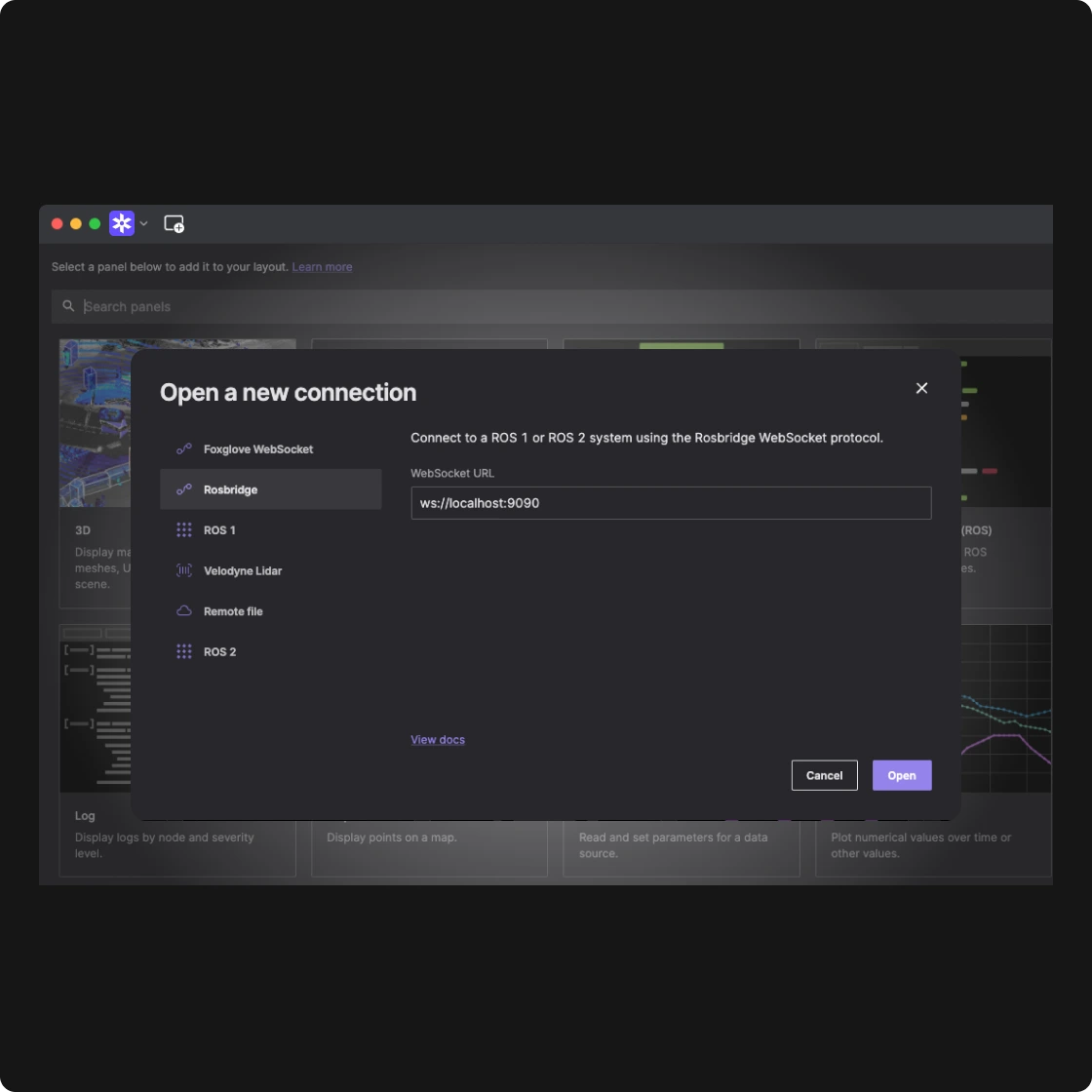
Versatile and effortless connections to your ROS data.
Easily connect to your ROS data with the native Foxglove Bridge, a high-performance C++ node that seamlessly links ROS stacks to Foxglove via WebSocket. The Foxglove Bridge provides a stable, high-performance connection to ROS 1 and ROS 2 out of the box for smooth integration.
04
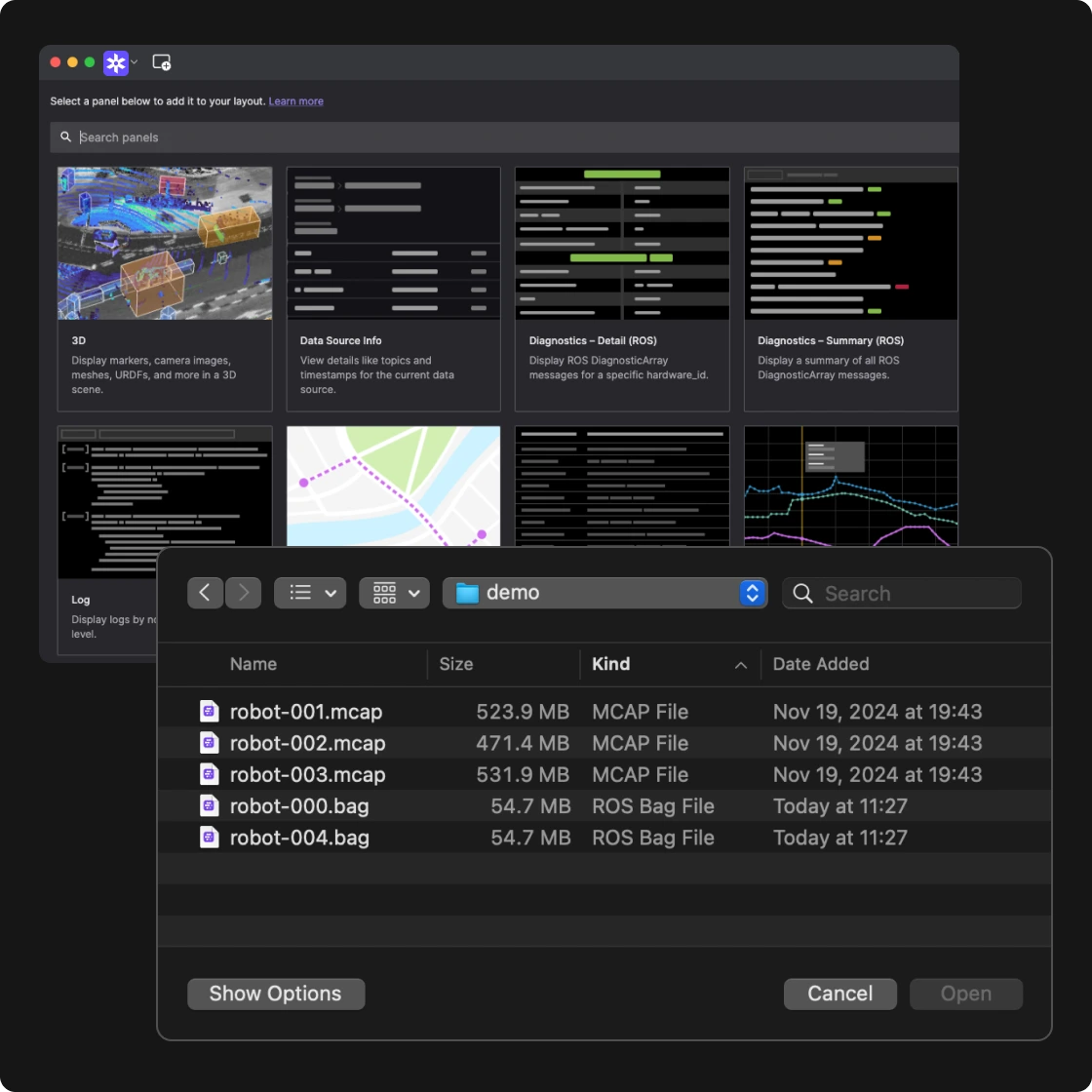
Drag-and-drop simplicity for local files and offline visualization.
Get started instantly. Load files effortlessly by dragging and dropping, double-clicking, or selecting "Open local file." With support for formats such as ROS 1 (.bag), ROS 2 (.db3), MCAP, and PX4 ULog, Foxglove delivers seamless integration and visualization for all your diverse data formats.